








물리 기반 카메라를 위한 확장 가능한 하드웨어 인 루프
Simcenter Prescan의 이전 릴리스에서 우리는 하드웨어 인 더 루프(HiL) 설정의 확장성 및 성능 문제를 해결하는 혁신적인 방법을 도입했습니다. 엔지니어에게 시뮬레이션에서 생성된 센서 데이터에 액세스할 수 있는 인터페이스를 제공하여 GPU에서 데이터가 생성되는 즉시 액세스하고 동시에 테스트 중인 장치로 GPU 데이터 전송을 수행합니다. 이는 기존 CPU 기반 데이터 전송보다 훨씬 빠릅니다. Simcenter Prescan 2407을 통해 이 기능을 물리 기반 카메라에 사용할 수 있게 되었습니다.
센서 데이터 전송 확장성 문제를 해결하는 것 외에도, 테스트 대상 장치에서 제어 신호를 수신하여 차량 역학을 실행하는 실시간 플랫폼에 공급할 수 있는 하드웨어 독립적인 모듈형 HiL 프레임워크도 만들고 있습니다. 이 릴리스는 사용자가 실행할 수 있는 데모와 함께 이 프레임워크를 도입한 것을 의미합니다. 실시간 하드웨어 시스템에 Simcenter Prescan을 설치해야 했던 이전 HiL 설정과 달리, 이 데모는 이 설치가 필요하지 않습니다. 실시간 시스템에서만 차량 역학을 실행하면서 강력한 시뮬레이션 PC에 Simcenter Prescan을 배포합니다.
Simcenter Prescan을 사용한 자동 조종 장치, 차선 표시 센서 및 도로 지형 탐색
이 릴리스는 Simcenter Prescan을 사용하여 사용자가 오토파일럿 사용 사례에서 내비게이션을 처리할 수 있도록 하는 데 중점을 두고 있습니다. 시뮬레이션을 사용하여 오토파일럿 시스템 설계 및 테스트에서 내비게이션을 처리하는 데 있어 중요한 과제 중 하나는 시뮬레이터에서 정확한 도로 및 차선 정보를 얻는 것입니다. 이 릴리스에서는 차선 마커 센서를 확장하여 오토파일럿 사용 사례에서 내비게이션을 활성화하는 데 필요한 추가 출력을 제공함으로써 이 문제를 해결했습니다.
Simcenter Prescan을 통한 고급 표면 모델링 및 사실적인 3D 자산을 통한 향상된 레이더 및 카메라 시뮬레이션
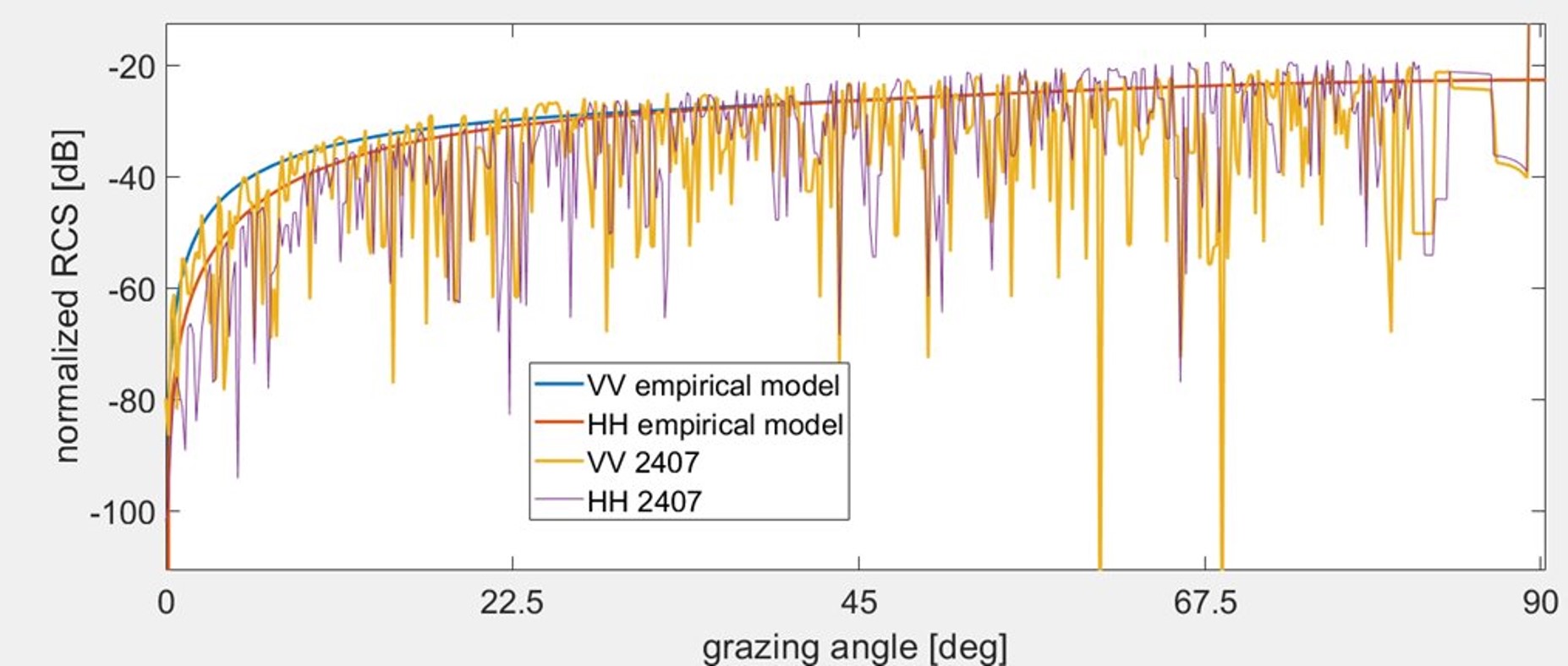
레이더 시뮬레이션을 위한 거친 표면을 모델링하는 것은 레이더파가 포인트 타겟과 다르게 이러한 표면과 상호 작용하기 때문에 복잡합니다. 거친 표면은 레이더파를 여러 방향으로 분산시킵니다. 당사의 물리 기반 레이더는 이러한 미묘한 물질적 거동을 정확하게 포착하여 거울 반사의 전력 반환이 측정값과 일치하고 비거울 반사가 기존 데이터와 잘 일치하도록 합니다.
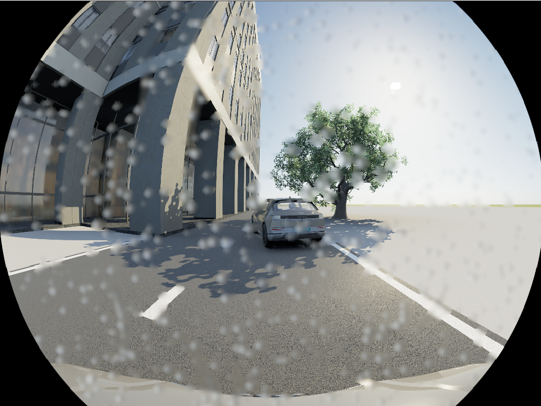
마찬가지로, 카메라 렌즈에 떨어지는 빗방울은 이미지 품질과 정확도에 상당한 영향을 미칠 수 있습니다. 빗방울이 카메라 이미지에 미치는 영향을 모델링함으로써, 우리는 이러한 날씨 효과를 완화하기 위한 더 나은 이미지 처리 알고리즘을 개발할 수 있습니다. 이번 릴리스에서는 렌즈 위의 빗방울 움직임을 사실적으로 시뮬레이션하고 모양과 이미지 마스크를 고려하기 위해 어안 카메라 모델을 개선했습니다.
또한, 53피트 트레일러 모델과 추가적인 인간 모델을 포함하여 즉시 사용 가능한 3D 자산 라이브러리를 확장했습니다.
다음은 무엇인가요?
레벨 4 자율 주행차로 빠르게 발전하는 세상에서 Siemens Digital Industries는 선두에 서서 가상 테스트와 실제 테스트 간의 격차를 메웁니다. Simcenter Autonomy 포트폴리오의 일부인 Simcenter Prescan은 주행 데이터를 폐쇄 루프 테스트 및 안전 검증을 위한 시나리오 스니펫으로 변환하는 원활한 솔루션을 제공합니다. 현재 가장 위험하고 어려운 시나리오를 발견하고 구체화하는 획기적인 솔루션을 개발하고 있습니다. 곧 출시될 중요 시나리오 생성 서비스를 통해 도로에서 이러한 상황을 안전하게 탐색할 수 있도록 시스템을 사전에 준비할 수 있습니다. 계속 주시하고 이 흥미로운 혁신 여정에 동참해 주시기 바랍니다.
[출처] https://blogs.sw.siemens.com/simcenter/whats-new-in-simcenter-prescan-2407/


댓글 없음
댓글 쓰기