








자율 무인 항공기 및 첨단 항공 이동 차량의 안전한 작동을 보장하려면 탐지 및 회피, 위치 파악 기능과 같은 자율 비행 기능을 갖춘 비행 제어 시스템을 다양한 비행 시나리오 및 작동 조건에 대해 광범위하게 검증해야 합니다. 따라서 디지털 트윈은 안전한 제품을 보장하는 효율적인 개발 프로세스의 일부로써 가치가 매우 높습니다.
MARLOC 프로젝트 내에서 우리는 자율 항공 시스템을 위한 위치 파악 기능을 갖춘 비행 컨트롤러의 개발 및 검증을 위해 Simcenter Amesim 및 Simcenter Prescan 소프트웨어를 기반으로 하는 시뮬레이션 프레임워크를 조사했습니다. 위치 파악 기능을 정확하게 평가하려면 현실적인 비행 궤적을 시뮬레이션해야 합니다. 이를 달성하기 위해 우리는 물리적인 Pixhawk 비행 컨트롤러가 디지털 트윈과 통합된 HiL(Hardware-in-the-Loop) 시뮬레이션 프레임워크를 만들었습니다.
시뮬레이션 프레임워크
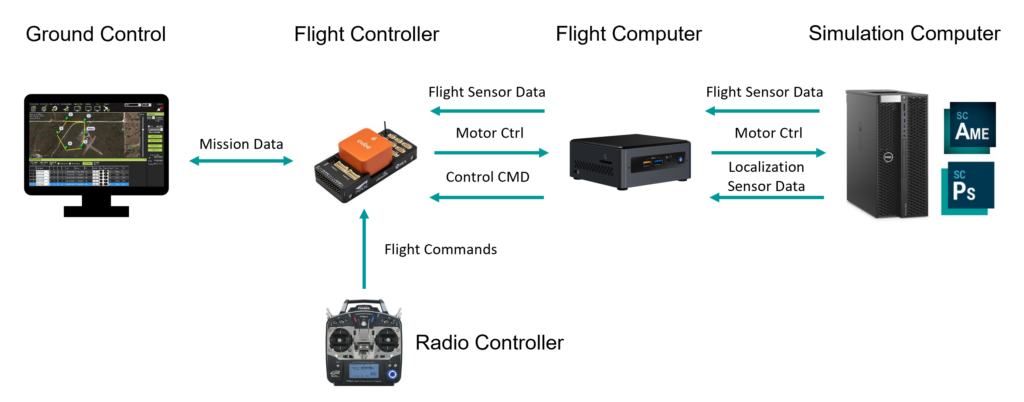
개발된 HiL 시뮬레이션의 전체 아키텍처는 그림 1에 나와 있습니다. Simcenter Amesim은 추진 시스템과 함께 비행 역학을 모델링하는 데 사용되었습니다. Simcenter Prescan은 가상 환경을 생성하고 차량에 부착된 카메라 센서를 모델링하는 데 사용되었습니다. ROS 네트워크는 시뮬레이션 소프트웨어와 비행 컨트롤러 하드웨어 간의 통신을 설정하는 데 사용되었습니다. 시뮬레이션을 시작하기 위해 일련의 웨이포인트가 지정되고 별도의 노트북에서 실행되는 QGroundControlStation 소프트웨어를 통해 Pixhawk로 전송됩니다. 그런 다음 비행 컨트롤러는 이러한 웨이포인트를 연결하는 궤적을 따라 차량을 조종하려고 시도합니다. 항공기 역학은 Pixhawk가 UAV 모델의 모터에 제공한 입력을 기반으로 Simcenter Amesim에서 시뮬레이션됩니다. 새로운 위치가 계산되어 Simcenter Prescan으로 전송되어 환경 내 항공기 위치를 업데이트합니다. 항공기가 비행하는 동안 Simcenter Prescan에서 시뮬레이션된 카메라 센서는 나중에 비행 컴퓨터에서 실행되는 포즈 추정 알고리즘으로 전달될 카메라 피드를 생성합니다.
사용 사례
Simcenter Amesim에서 개발된 드론의 디지털 트윈 모델은 그림 2에 나와 있습니다. 이 모델은 MARLOC 프로젝트 파트너인 FlandersMake 연구소의 기존 드론을 기반으로 제작되었습니다. 실험 테스트에서 얻은 크기, 질량 및 관성 특성, 프로펠러 및 모터 매개변수를 고려하여 무인 차량의 물리적 역학을 엄격하게 모델링합니다.
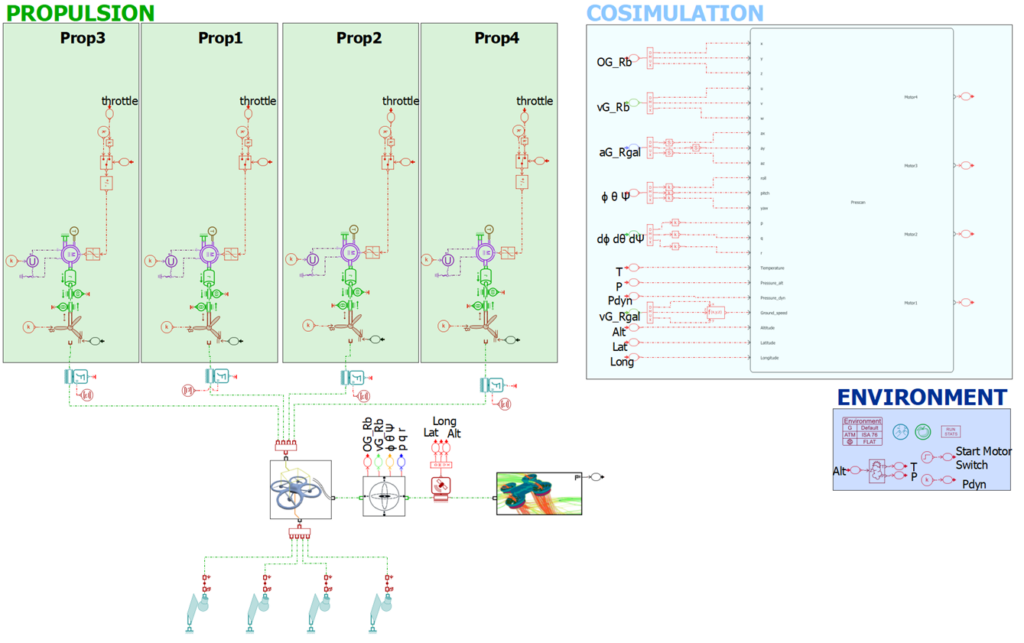
공동 시뮬레이션 블록은 프레임워크의 다른 구성 요소와의 데이터 교환을 지정합니다. 이러한 방식으로 블록 오른쪽에서 Simcenter Amesim은 Pixhawk 비행 컨트롤러로부터 모터 모델에 대한 4개의 스로틀 입력을 수신합니다. 왼쪽에는 명령된 스로틀을 기반으로 Simcenter Amesim에서 계산된 상태가 프레임워크를 통해 전송되도록 결정됩니다.
프레임워크의 또 다른 측면은 환경 모델입니다. QGroundControl의 궤적에 지정된 것과 동일한 환경에서 사실적인 카메라 이미지와 비행을 생성하기 위해 그림 3과 같은 런던 브리지 지역의 모델이 생성되었습니다. 이 환경은 건물을 생성하고 3D 모델에 텍스처를 적용하기 위해 OpenStreetMaps에서 제공되는 위성 데이터를 사용하여 개발되었습니다.
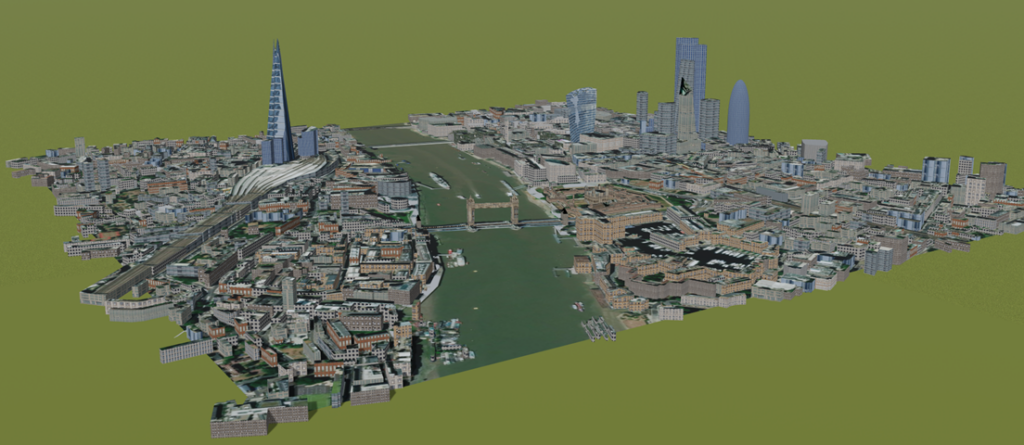
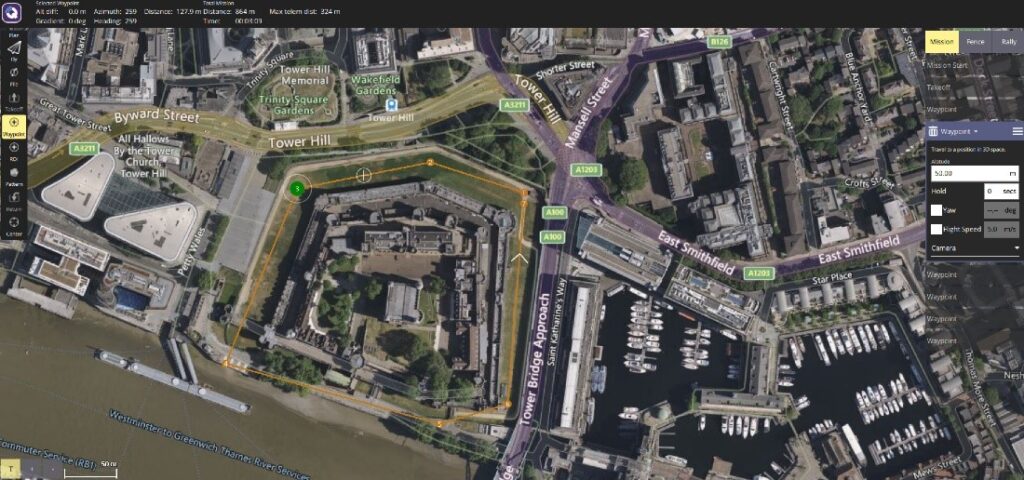
그림 4는 지정된 웨이포인트를 보여줍니다. Pixhawk가 Ground Control 노트북에서 실행되는 QGroundControl 소프트웨어를 사용하여 런던 브리지 주변을 비행할 수 있는 궤적을 생성합니다. Simcenter Prescan에서 생성된 3D 모델과 일치하면 차량이 따라갈 궤적과 카메라에서 생성된 이미지가 실제 환경과 일치합니다.
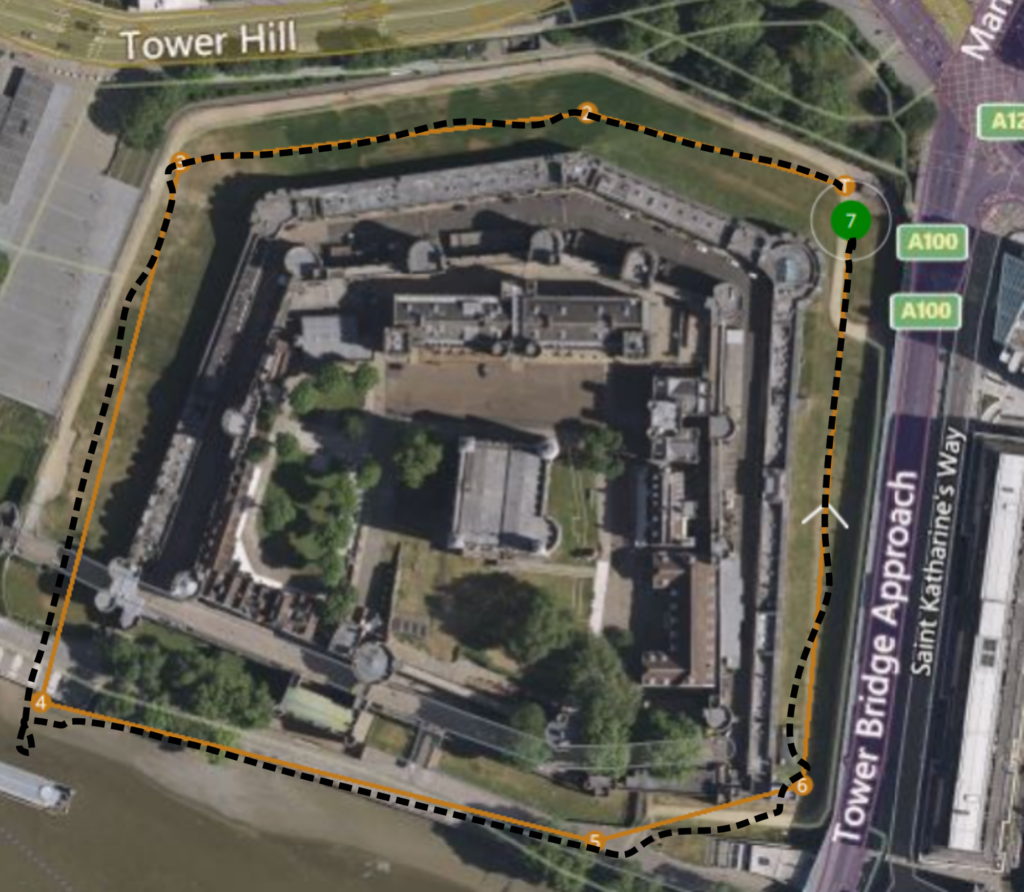
시뮬레이션에서 드론 모델은 비행 컨트롤러로부터 조종 명령을 받아 궤적을 따라갈 수 있었습니다. 얻은 결과는 그림 5에 나와 있으며, 여기서 UAV가 따르는 결과 궤적은 QGroundControl의 웨이포인트에 의해 지정된 궤적 위에 검은 점선으로 표시됩니다.
결론적으로
시뮬레이션 프레임워크를 사용하여 비행 컨트롤러와 같은 실제 하드웨어를 통합하여 기능을 테스트할 수 있다는 것이 입증되었습니다. Simcenter Amesim의 UAV 모델이 필요한 속도로 비행 컨트롤러 작동을 준수하는 비행 데이터를 계산하는 주요 과제는 성공적으로 달성되었습니다. 또한 Simcenter Prescan에서 다양한 센서를 시뮬레이션하여 감지 및 회피 또는 동시 위치 파악 및 매핑 알고리즘과 같은 자율 기능을 검증할 수 있습니다.
향후 작업에서는 HiL 시뮬레이션에서 얻은 궤적을 사용하여 다양한 기상 조건에서 SLAM(시각적 동시 위치 파악 및 매핑) 알고리즘을 평가합니다.
[출처] https://blogs.sw.siemens.com/simcenter/hil-simulation-framework-uav/

댓글 없음
댓글 쓰기